Русский
РусскийAutonomous and Remote Navigation Trial Project starts wide autonomous navigation
Autonomous and Remote Navigation Trial Project (ARNTP) is implemented as a part of the “MARINET” roadmap of the National Technology Initiative with support by the Ministry of Industry and Trade of the Russian Federation, with the involvement of the Ministry of Transport of the Russian Federation and Russian Maritime Register of Shipping.
The strategic aim of the project is the establishment of technical and legal conditions for the wide maritime autonomous surface ships (MASS) operation by shipping companies under the flag of Russian Federation from 2021 January and in any other country which will be ready to follow our approach.



Ships participating in ARNTP: Mikhail Ulyanov by SCF, Pola Anfisa by Pola Group, Rabochaya within dredging caravan by Rosmorport
(more…)



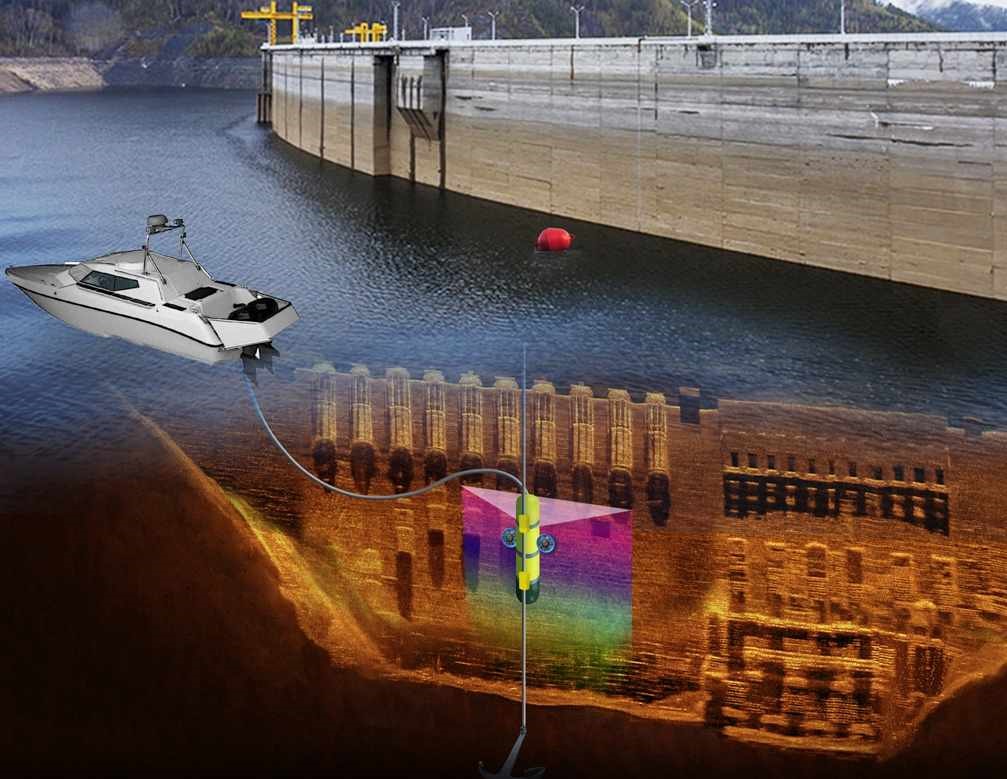
 MariMag is high-sensitive, precise and compact system for magnetic surveys both in shallow and deep waters. Precise Overhauser MariMag sensor provides stable operations without any maintenance in a ten-year period.
MariMag is high-sensitive, precise and compact system for magnetic surveys both in shallow and deep waters. Precise Overhauser MariMag sensor provides stable operations without any maintenance in a ten-year period.

 Mobile marine system for hydraulic fracturing – a set of technological equipment for marine applications, providing for enhancement and acid fracturing, offshore oil and gas fields, including on the Arctic shelf.
Mobile marine system for hydraulic fracturing – a set of technological equipment for marine applications, providing for enhancement and acid fracturing, offshore oil and gas fields, including on the Arctic shelf.