
 Русский
РусскийSimulator for remote operators of inland water autonomous vessel presented
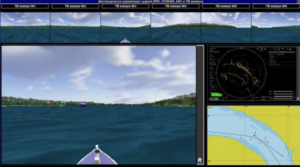 In 2023, MARINET together with industrial partner NPK Systems and Technologies, developed draft national standards GOST R “Operator simulator for an autonomous inland water merchant vessel. Terms and definitions” and GOST R “Operator simulator for an autonomous inland water merchant vessel” and a prototype of the simulator for remote operators of inland water autonomous vessel “ASM – 2023”. (more…)
In 2023, MARINET together with industrial partner NPK Systems and Technologies, developed draft national standards GOST R “Operator simulator for an autonomous inland water merchant vessel. Terms and definitions” and GOST R “Operator simulator for an autonomous inland water merchant vessel” and a prototype of the simulator for remote operators of inland water autonomous vessel “ASM – 2023”. (more…)
 Government Commission for Modernization of the Economy and Innovative Development of Russia approved support of the project
Government Commission for Modernization of the Economy and Innovative Development of Russia approved support of the project 