
 Русский
РусскийComplex maritime robotic system for the offshore operations
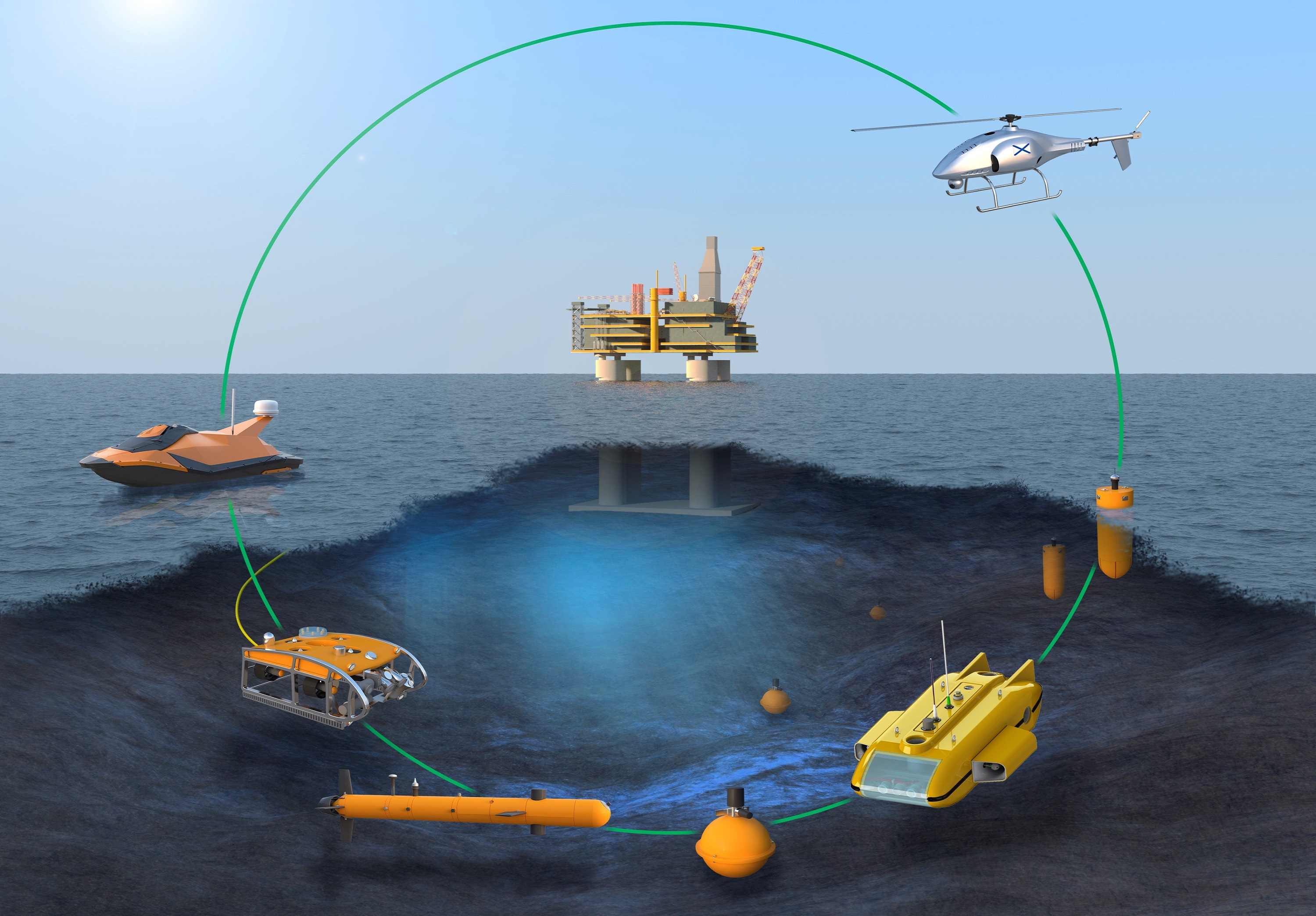 Complex maritime robotic system provides the interaction of the underwater, surface and air unmanned vehicles (groups of vehicles). Intellectual information management system (IMS) allows to significantly simplify and automate the control of the robots. With the IMS an operator can develop a task (mission), test it, program the functioning of each robot, monitor the process execution and the technical condition of the elements of the complex robotic system, collect and process the incoming information, quickly correct the actions or change the mission completely. (more…)
Complex maritime robotic system provides the interaction of the underwater, surface and air unmanned vehicles (groups of vehicles). Intellectual information management system (IMS) allows to significantly simplify and automate the control of the robots. With the IMS an operator can develop a task (mission), test it, program the functioning of each robot, monitor the process execution and the technical condition of the elements of the complex robotic system, collect and process the incoming information, quickly correct the actions or change the mission completely. (more…)


 The creation of remote energy sources is a resource-intensive and complex task. There are important questions of necessity to provide long-term operation, reliability and absence of vibrations are sharply raised. Often, such energy sources are discarded in favor of simpler alternatives because of the increased cost of generated energy. But, thanks to the rapid development of semiconductor technologies and an increase in the efficiency of thermoelectric processes, new opportunities have appeared to increase the efficiency of remote systems.
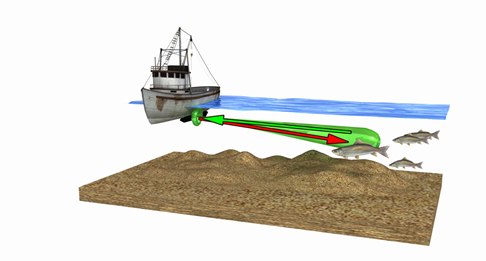
The creation of remote energy sources is a resource-intensive and complex task. There are important questions of necessity to provide long-term operation, reliability and absence of vibrations are sharply raised. Often, such energy sources are discarded in favor of simpler alternatives because of the increased cost of generated energy. But, thanks to the rapid development of semiconductor technologies and an increase in the efficiency of thermoelectric processes, new opportunities have appeared to increase the efficiency of remote systems. The essence and content of the project, the available groundwork. The analysis of the technical means installed on the vessels providing the possibility of obtaining the observable coordinates of the ship’s position allows us to conclude that the only backup (independent of the presence of a radio signal and power supply) is the astronomical way of determining the observable coordinates of the ship’s position when navigating on the high seas.
The essence and content of the project, the available groundwork. The analysis of the technical means installed on the vessels providing the possibility of obtaining the observable coordinates of the ship’s position allows us to conclude that the only backup (independent of the presence of a radio signal and power supply) is the astronomical way of determining the observable coordinates of the ship’s position when navigating on the high seas.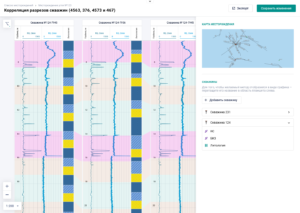 LLC “ActionSpace” within the Digital Design Group of Companies developed the Software Platform for automatic data processing of Well Logging (hereinafter WL) .
LLC “ActionSpace” within the Digital Design Group of Companies developed the Software Platform for automatic data processing of Well Logging (hereinafter WL) .