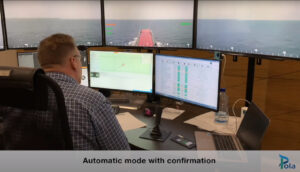
A video recording of the entire a-Navigation complex in real operation was first shown to representatives of the International Maritime Organization (IMO), shipping companies and scientific centers during an online conference on a-Navigation in Moscow.
“Russia avails regulatory and technology assets to offer all interested parties. I welcome all countries to join our experience providing exceptional opportunities for all mankind in terms of navigation safety”, – said AleksandrPoshivai by inviting Conference participants to enjoy the video of an example of a-Navigation Trial Project.
“This year, we are completing a large-scale a-Navigation Trial Project – in real conditions – and beginning a national experiment on the trial operation of autonomous vessels under the Russian flag. In December last year, the Russian government, the Flag State administration, approved the Decree on conducting such an experiment, considering the IMO’s Interim Guidelines for the Maritime Autonomous Ships Trials. In accordance with it, any shipping company will be able to equip its ships under the Russian flag with autonomous navigation systems and operate them in their regular activities as part of the national experiment”, – he emphasized. (more…)

 Русский
Русский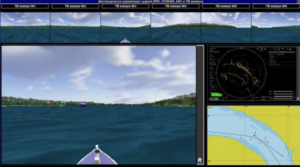 In 2023, MARINET together with industrial partner NPK Systems and Technologies, developed draft national standards GOST R “Operator simulator for an autonomous inland water merchant vessel. Terms and definitions” and GOST R “Operator simulator for an autonomous inland water merchant vessel” and a prototype of the simulator for remote operators of inland water autonomous vessel “ASM – 2023”. (more…)
In 2023, MARINET together with industrial partner NPK Systems and Technologies, developed draft national standards GOST R “Operator simulator for an autonomous inland water merchant vessel. Terms and definitions” and GOST R “Operator simulator for an autonomous inland water merchant vessel” and a prototype of the simulator for remote operators of inland water autonomous vessel “ASM – 2023”. (more…) Russian University of Transport, Harbin Engineering University and Wuhan University of Technology invite you to the 2nd International High-Level Forum on Smart and Autonomous Navigation Technologies of ships held
Russian University of Transport, Harbin Engineering University and Wuhan University of Technology invite you to the 2nd International High-Level Forum on Smart and Autonomous Navigation Technologies of ships held
 Russia sent the official report on autonomous ships trials of 2021 to the International Maritime Organization. The proper reporting is requested by the Interim Guideline on MASS Trials (MSC.1/Circ.1604) issued by the IMO in 2019. Previously, Japan, China and France also reported on MASS (maritime autonomous surface ship) trials conducted in those countries.
Russia sent the official report on autonomous ships trials of 2021 to the International Maritime Organization. The proper reporting is requested by the Interim Guideline on MASS Trials (MSC.1/Circ.1604) issued by the IMO in 2019. Previously, Japan, China and France also reported on MASS (maritime autonomous surface ship) trials conducted in those countries. On November 16-17, 2021 the 1st International High-level Forum on Smart and Autonomous Navigation Technology of Ships was organized by Russian Transport University, Harbin Engineering University, Tokyo University of Marine Science and Technology, Norwegian University of Science and Technology, Wuhan University of Technology, Satakunta University of Applied Sciences with support of International Maritime Organization (IMO), Industry Association MARINET, Innovation & Cooperation in Naval Architecture & Marine Engineering (ICNAME) Alliance, China Association of the National Shipbuilding Industry.
On November 16-17, 2021 the 1st International High-level Forum on Smart and Autonomous Navigation Technology of Ships was organized by Russian Transport University, Harbin Engineering University, Tokyo University of Marine Science and Technology, Norwegian University of Science and Technology, Wuhan University of Technology, Satakunta University of Applied Sciences with support of International Maritime Organization (IMO), Industry Association MARINET, Innovation & Cooperation in Naval Architecture & Marine Engineering (ICNAME) Alliance, China Association of the National Shipbuilding Industry. 18 декабря в Южно-Сахалинске под патронатом губернатора Валерия Лимаренко два ведущих вуза Дальнего Востока в области морских технологий – Морской государственный университет имени адмирала Г.И. Невельского и Сахалинский государственный университет – и судоходная компания «Морспецсервис» подписали соглашение подготовке специалистов автономной навигации (a-Навигации).
18 декабря в Южно-Сахалинске под патронатом губернатора Валерия Лимаренко два ведущих вуза Дальнего Востока в области морских технологий – Морской государственный университет имени адмирала Г.И. Невельского и Сахалинский государственный университет – и судоходная компания «Морспецсервис» подписали соглашение подготовке специалистов автономной навигации (a-Навигации).

